
Brief Bio
I am a Lecturer in Artificial Intelligence at the School of Computing and Communications, The Open University. My research focuses on developing efficient and trustworthy AI and machine learning algorithms to enhance the performance of diverse robots working alongside humans in dynamic and complex environments. I have a multidisciplinary background in electronics engineering, software development, mechatronics, human-robot interaction and aerial robotics.
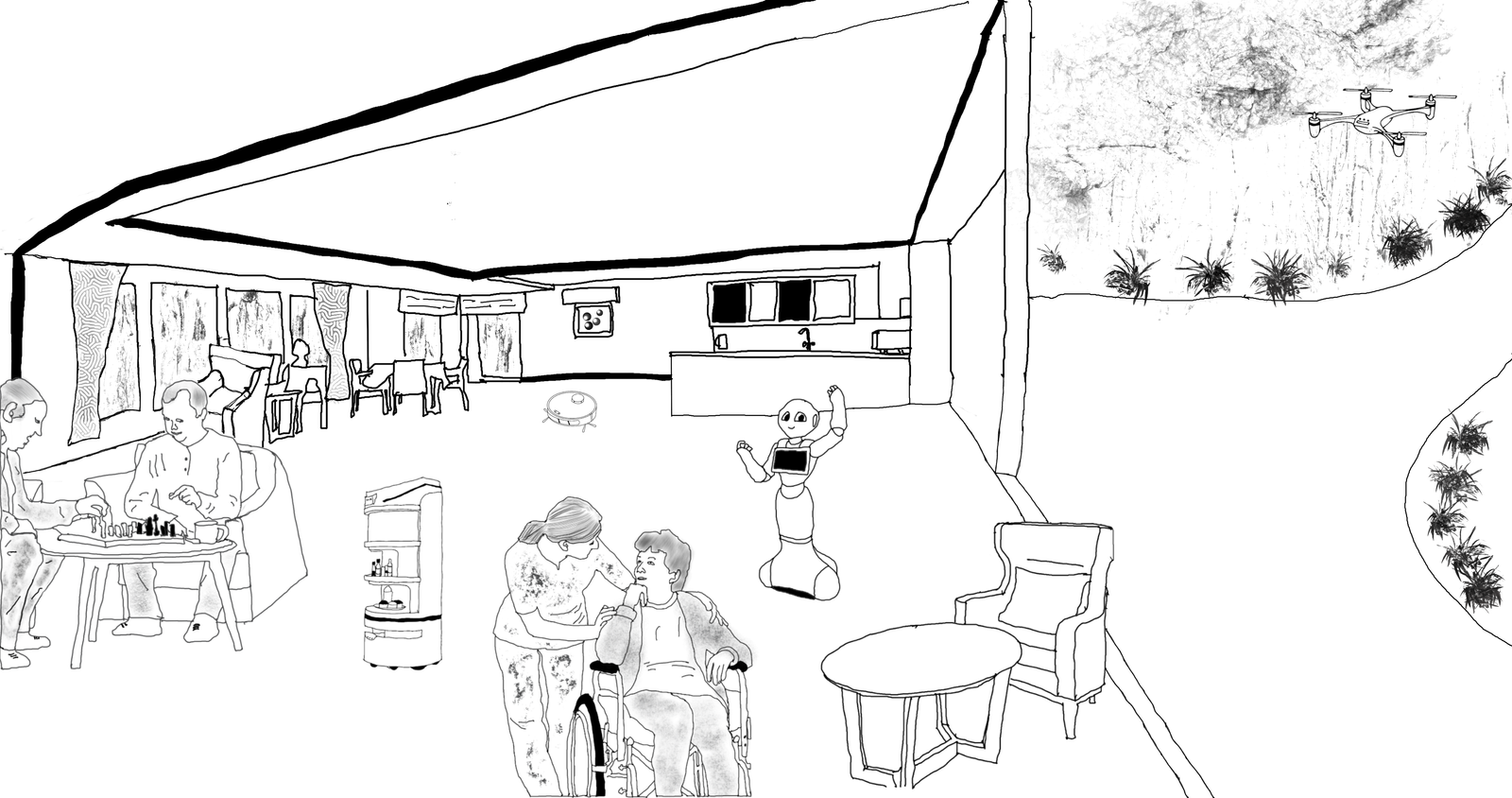
My main research interests are in Aerial Robotics, Human Robot Interaction (HRI), AI & Machine Learning, and Swarm Robotics. My current research focuses on:
- Multi-Human Multi-Robot (MHMR) Coordination
- Human-UAV Interaction
- Human-Swarm Interaction (HSI)
Here are some of my research projects below.

Multi-Human Multi-Robot (MHMR) ROS Gazebo High-Fidelity Simulation - GitHub
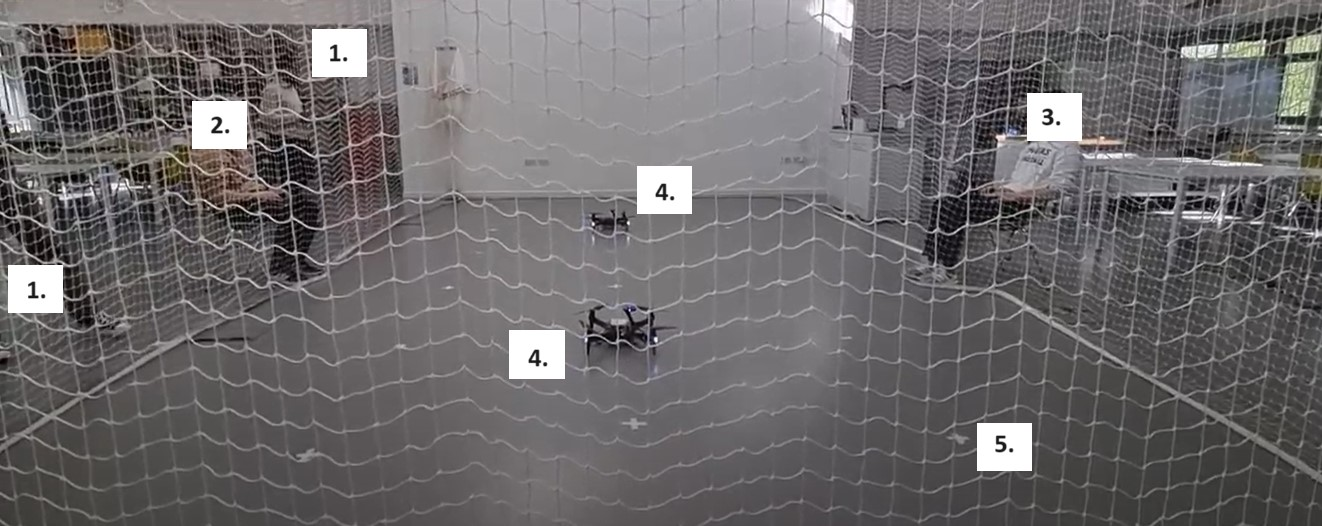
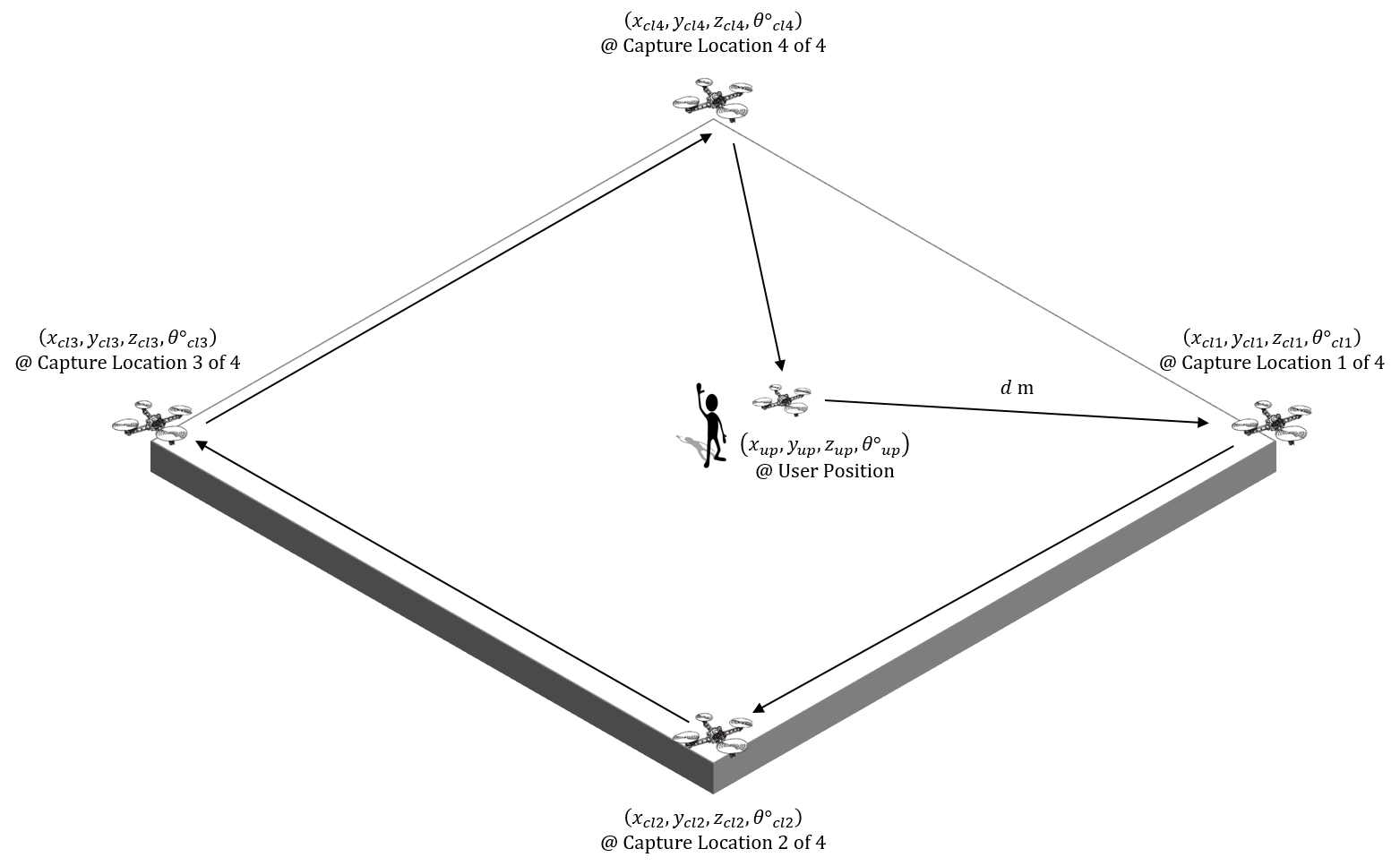
Mapping Safe Zones for Co-located Human-UAV Interaction - TAS'24
How close can a robot be to a co-located human without making them uncomfortable or anxious?
I aim to enable a future where adaptive, context-aware robots (both aerial and ground) can operate safely, efficiently, and intuitively around people. My research advances control algorithms that allow robots to integrate seamlessly into human environments - navigating safely and interacting effectively with co-located humans. For more details, visit my research, publications, and funding pages.
My teaching responsiblities are mostly centered around robotics and artificial intelligence. For more details, visit my teaching page.